
Maker Faire Tokyo 2022でAIカーを走らせたよ!
1960年代にマーシャル・マクルーハンが、未来のクルマはオモチャだと述べている(THE CAR AS A TOY、『MACLEAN'S』1967)。将来的に、人やモノの移動は情報の移動に完全にとって代わられるかもしれない。そのときに、車は楽しくてゲーム的な《オモチャ》になる。子供たちは、車が娯楽であることを知っているように。
米国でもモータリゼーションが加速した時代に、なんという慧眼だという気がするが、私は、ここ3年半ほど《オモチャ》のクルマで遊んでいる。市販のラジコンカーに Raspberry PiやJetson nanoをのっけて、AI(人工知能)で走らせる《AIカー》というものだ。
9月3、4日に東京ビッグサイトで開催された《Maker Faire Tokyo 2022》でその走行会をやらせてもらった。これに、参加してくれたクルマたちがそれぞれ趣向をこらしていて、《これぞオモチャとしてのクルマの楽しさの神髄かもしれない》と思ったので紹介したいと思う。
このまま先に読み進んでいただくのでよいのだが、もう少しきっちりとAIカーがどんなものか知ってから読みたいという人は、以下の過去記事に目を通していただきたい。
「走行会をやらせてもらった」と書いたが、これは、私が仲間たちとやっているFacebookグループ「AIでRCカーを走らせよう!」による主催。そして、今回は某自動車メーカーの有志技術団体が開催している「自動運転ミニカーバトル」との共催。さらには、NTT PCさんの協力もいただくことができた。当日は、個人での参加はもちろんのこと、タミヤの社内チーム、会津大学、神奈川工業大学の研究室やチームも参加。

今年のMFT2022での走行会。セッティングエリアの向こうにコースや会場が見える(たぶん今年のMaker Faire Tokyo では最大面積のブース)。
まずは、そのようすがわかる次のビデオをご覧あれ。冒頭、いきなりカエルくん(!)に軽快に抜かれてスピードダウンするのは、私のAIカー(DonkeyCar)。コースの設営やタイムトライアルのようす、サブコースなど全体のようすなんかも分かる内容になっている。
現在、AIカーの主流は、オープンソースとしてコミュニティで公開されてきた《DonkeyCar》とNVIDIAが提供している《JetRacer》の2つ。DonkeyCarを例に説明すると、まず人間がラジコン操作でコースを走らせる。これによって、AIカーは“カメラに映った風景”と“ステアリングとスロットルの状態”を関係づけて学習する。コンピューター上で学習モデルができたとろでコースに放ってやると、自分のクセまで再現して走ってくれるというものだ。
次の動画は、私のDonkey Carの車載カメラ(Insta360 One X)からの映像。
このビデオの冒頭部分は1本目のビデオの冒頭部分を車載カメラから見た風景。そのあとは、私のDonkey Carの自律走行のようす。今回、5周くらいの学習走行でこんな具合で走らせることができた。AIは、人間が車を運転するときそれをやっているように風景の中からなんとなく特徴点をみつけてハンドルやアクセルを操作している。ライントレースのように決まった目印を認識してIF-THEN-ELSE的にステアリングを切っているのではない。
ここがなんとも、AIカーの人間っぽいところであり、機械学習の醍醐味といってもよい。もう自分の分身が1/16スケールに縮尺して、走っているようなようすを暖かく見守る感じになる。
参加AIカーくんたちを片っ端から紹介
それでは、今回参加してくれたAIカーたちを紹介していくことにしよう。まずは、ビデオにも出てきた私のDonkey Carから。というのは、最も標準的で何も工夫をこらしていないAIカーだからだ。
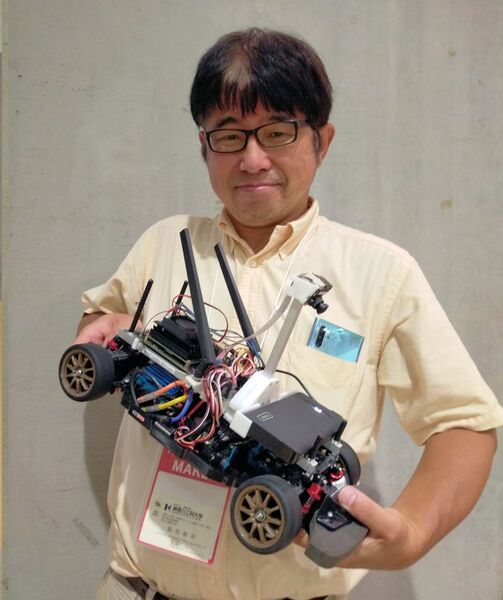
DonkeyCar/遠藤 諭(角川アスキー総研)

本人コメント「2018年にはじめて走らせたDonkeyCarをいまだに走らせている。今回参加した中では最もベーシックかつ古典的なAIカーといえる。学習モデルも、仲間のマシンで作ってもらいながらもなんとか自律走行には成功してとても嬉しかった」(Twitter:@hortense667)。

これがAIカーの標準モデルといっていいDonkey Car。暴走したときにすぐに捕まえにいける取っ手がついているのがなんとも秀逸。
DonkeyCar(Ver4)/中島幸一さん

Donkey Carの進化をキャッチアップ、4WS化もされている! 本人コメント「室内の一畳くらいの小さなコースでも遊べるように、RCカー2台を購入してそのステアリングメカを前後に取り付けた4WS改造マシン。ROSもソースビルドでインストール済み。Matlabとも連携できるようにしたので今後の機能拡張に期待!?」とのこと(テクニカルタームの説明は割愛させていただきます)。

バギーのように前後に伸びたサスペンションがカッコいい。狭いコースで走らせたいというのはAIカー関係者の大きなテーマ。
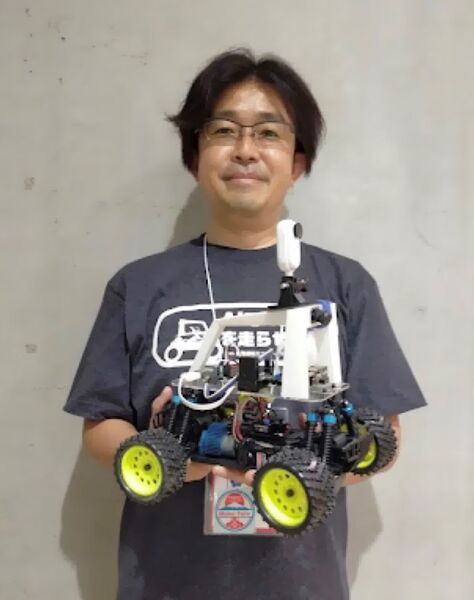
配達ロボット『ゴエモン』です!/HondaSanさん

今回もっともビッグなAIカーを走らせてくれたのは唯一の女性参加者のHondaSanさん。本人コメント「配達を行うことを目的に製作したDonkeyCarです。荷物を運ぶ重さに耐えることのできる6輪車を選び、野外でも車体が倒れず、車輪が滑らないようにタイヤも大きなものに変更しています。他にもオプションを色々と付けましたが、次回は更にアップデートしたゴエモンをお披露目できるようにしますので楽しみにしていて下さい!」とのこと。本体前面にスマホをのせてディスプレイにできるようにも工夫されている。
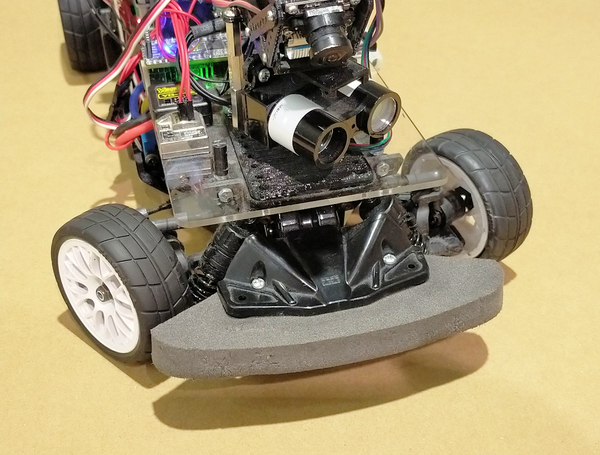
かえるカー(DonkeyCarベース)/浦川敦史さん

今回の走行会で圧倒的な人気をはくした浦川さんのDonkeyCarは見ての通りのデザイン。本人コメント「愛くるしい動きとこだわりが詰まった《かえるのピクルス3輪車RC》を開発したRCカーレーサー菅谷さんに弟子入りさせてもらい、なんとかしてAIカーに。重心が高いためコーナーが苦手。新開発のアクティブサスペンション機構を搭載し、コーナーで体を傾けることでなんとか曲がるようにしました。ものすごく作るのは大変だったけど、走らせれば愛くるしい動きでそんなことはどうでもよくなりました」とのこと。コースの壁に激突してリカバーに向かう浦川さんの姿はとても楽しそうでした。

前輪部分のアップ。ハンドル操作のしくみがわかる。重要なのはむしろ後輪の全体を傾ける機構ですが。
JetRacer(タミヤ SW-01ベース)/齋藤健輔さん

本人コメント「JetRacerを家の中で走らせたいと思い、コンパクトなタミヤの 1/24 SW-01シャーシをベースにトリッキーな動きが得意な車体を軽快に動くよう改造しました。当初の構想としては、複数のセンサ類を連携させて多種の情報から最適な走行を推論させる車体をと考えていましたが、まだ道の途中って感じです。また、同様にギミックやアクセサリを付けることにより遊び心を持った、作っていて楽しい AIカーにしていきたいと考えてます(※今回はハロウィンが近いとの事でフランケンさんが同乗してます)」(Twitter:@KSxRDevelop)。
祇園祭の山車みたいなうず高く積まれている感じのフォルムがカッコいい。
TatamiRacer/小林 弘一
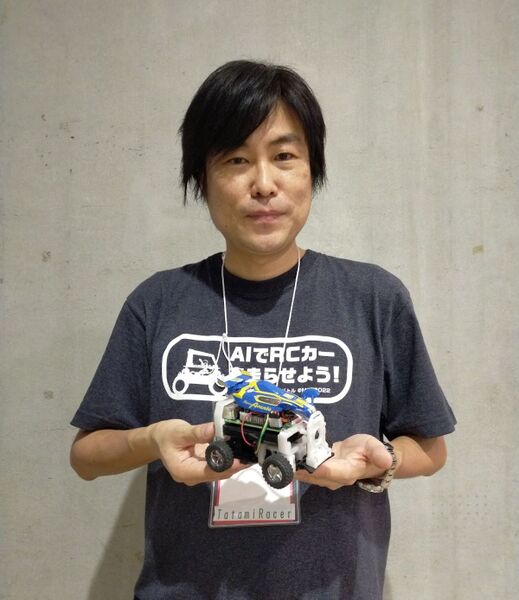
ユニークな超小型AIカーを着実に進化させてきている小林さん。本人コメント「ミニ四駆をベースとした小型AIカーです。畳一畳のスペースで走行できます。ステアリングなどのパーツは3Dプリンターで作っています。自動運転にDonkeyCarのソフトウェアを使用し、オープンソースハードウエアとして、3Dデータ、部品表、組み立て方法などをGitHubに公開しております( https://github.com/covao/TatamiRacer)」とのこと(Twitter: @covao_)。畳一畳で走らせられるのは本当に魅力!

DonkeyCarに比べるとこんなに小さい!
―――/熊澤剛さん

前回、Maker Faire Tokyo 2019での走行会では見事にレースを制した熊澤さんは名古屋からの参加。本人コメント「JetsonNXを安定的に動くように、大きなベースと大きなバッテリーを積んだ超重量級のマシンです。特徴は単独でAI学習ができる圧倒的なパワーですが、自重がありすぎて腹をこすりながら走行してしまいました。今回はJetRacerにしてみましたが、色々問題を抱えてちゃんと走ることができませんでした。次の走行会までに修正します」とのこと。
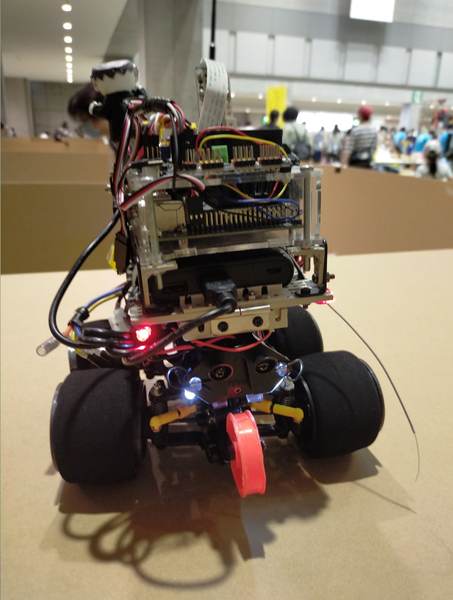
DonkeyCar V3.1.5,TAMIYA TT-02/松浦光洋(DonkeyCar名古屋)さん
本人コメント「特徴は、カメラの下にあるレーザー距離センサ(https://www.garmin.com/en-US/p/557294)、サーボでステアリングと連動し、障害物を検知するとブレーキを掛けることで衝突を回避(衝撃を軽減)します」とのこと(https://twitter.com/mituhiromatuura)。タッカーの操舵方向に向くヘッドライトを連想しました。
距離センサがステリアリングと連動しているようすがわかる。
Impreza/会津大学(奥山祐市研究室チーム)
走行会には毎回のように参加してくれている会津大学の奥山先生のチーム。本人コメント「TT02をベースとしたDonkeyCarです。ステアリングのパーツを変更し、コーナーが多いレーストラックで運転しやすいようにしました。また、カメラの高さと角度を変更できるようカメラステーを作りました。本番では、カメラの最適な位置を決めきることができなかったり、曲がるきっかけを認識できないコーナーがあったりしました。今後はAIにわかりやすい操縦方法を追求する、推論ネットワークを強化するなどして再挑戦したいです」。さすがに研究室で作られているAIカー、理論的に作られているようすが分かります。
―――/河村雅人さん
本人コメント「TT02 Type-S ベースのJetRacerです。ハードウェアの工夫点として、ラジコンのプロポの情報をデータ化するために追加のマイコンを搭載した点。ソフトウェアの工夫点として、 強化学習のAIを利用しています。人間のお手本なしに自動的に走行方法を学習します。ソフトウェアはGithubで公開しています(https://github.com/masato-ka/airc-rl-agent)」とのこと(Twitter @masato_ka)。AIソフトウェアに積極的に踏み込まれている点が、私のようにDonkeyCarのソフトまんまの人間からすると本当に輝いて見えます。
―――/瀧博士(株式会社タミヤ)さん
テレビ番組「タミヤRCカーグランプリ」でそのスジの方々にはあまりにもお馴染みの瀧博士がAIカーに参戦とは、ちょっとした事件ではないでしょうか? 本人コメント「TA-07にJetson nanoを搭載してあります。ソフトはNVIDIAのJetRacerを使っています。ボデイ搭載まで手が回りませんでした」とのこと。
某社で行われた走行会でめちゃめちゃ速かったとの報告あり。
―――/岩丸(株式会社タミヤ)さん

今回の走行会では学習走行、自律走行ともとても速かったタミヤの岩丸さん。本人コメント「TT-02にJetson nanoを搭載しています。NVIDIAのJetRacerを使用。カメラマウントが特徴です。マシンの基本性能を高めて速さを追求しています」とのこと。やはり、スピードが命か!!
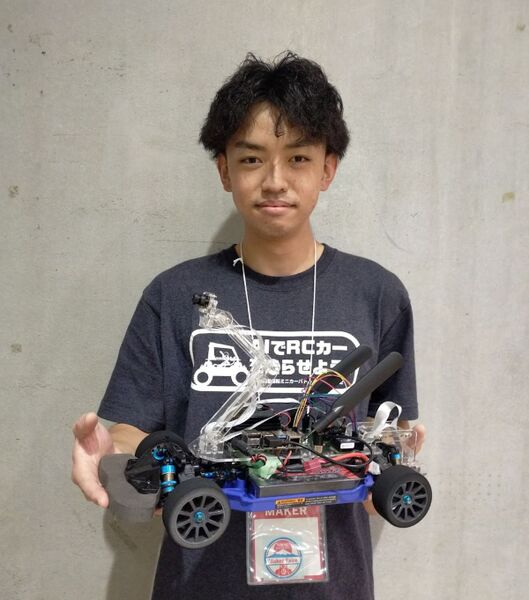
Donkey Car (HSP 94186 ラズパイ3、4.3.6.2)/山本直也(Kwiksher)さん

Faboの佐々木陽さんとともに初期からお世話になっている山本さんの車。本人コメント「2018年11月の浜松ものづくりハッカソンの時に組み立てました。その時、モータへの配線部分を破損したので、現在までクリップで留めています。できるだけオリジナルに合わせようと、PS3のコントローラ(Bluetooth)を秋葉原で中古で入手しました。Faboの基板も使ってます。取っ手でピックアップできる DonkeyCar スタイルが便利で 気に入ってます。脳波センサーと連携したこともあります、祈ると走る」。私も、PS3のコントローラを買うために秋葉原のBEEPに走りました。脳波コントロールも体験させてもらって楽しかった。
KaitXV1/脇田敏裕(神奈川工科大学)さん
大学では最も活発にAIカーに取り組まれている脇田先生も学生を引き連れて参加してくれました。本人コメント「最初、河村さんの展示に触発され大学講義に投入、佐々木さんに情報を頂きながら徐々に台数を増やし20台ぐらいになりました。大学内の自動運転AIカーレースを2022年3月に実施、第2回は高校生も交え2022年9月に開催。第3回は公開レースにしたいです。この車両は50km/h自動走行を目指して製作中で現在25km/hぐらいまできています。今回のコースには全くミスマッチでしたが、随時走行動画を上げています(Twitter: @toshiwakita)」とのこと。
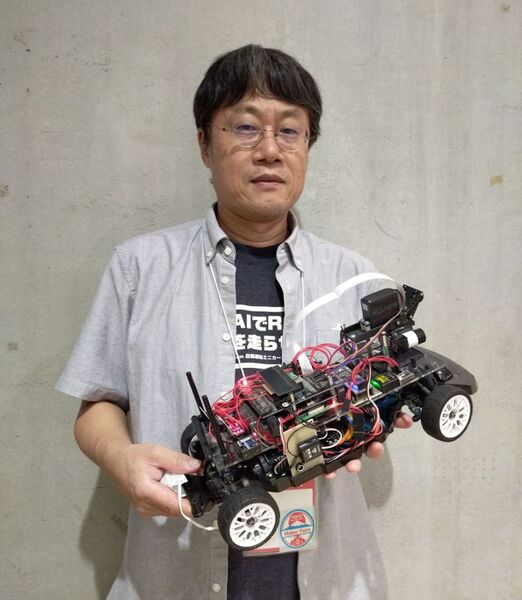
DonkeyCar (V3.1.5)/橋本憲治さん
本人コメント「2019年6月に組み立てて、MFT2019のコースを走らせたマシンです。別途、Insta360 GO 2 というカメラを上部に取り付けて、解像度が高い動画と走行時の音を記録しています。MFT2022では《本コース》の鋭角カーブをうまく曲がることができず苦しみましたが、《サブコース》の方は安定して走らせることができました」。
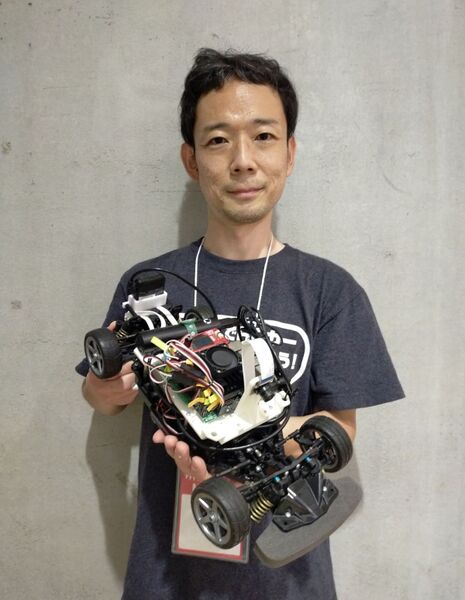
DonkeyCar (V4.3.6) &JetRacer (latest)/Kondo Hiromiさん

本人コメント「’22年の社内の有志団体のレース用に、初めて1/10のサイズのマシンを仕立て、去年いただいたJetson Xavier NX搭載。ライトでアクセルブレーキ、コーナリング方向、AI走行モードの表現をすることにハマる。MFTではDonkeyCar、JetRacerを最新verにして望むも、両プラットフォームでバグにハマる。なんとか走行できたものの、鈍足のねぶた祭り走行になった。タミヤさんとの、足回りや走行テク、データ取りの戦略で圧倒的な差を感じ、次のレースでは何とか策を練りたいところです。カメラは水平から30度下向きでマリカー画角、カメラ高さはレース規定いっぱいの30cm」。今回、走行会を共催の自動運転ミニカーバトルに参加されていたとのこと。

車体の前部にカメラがついてネス湖の恐竜みたいなシルエットになる車もある中、ボディデザインを生かした後部にカメラがある特徴的なデザイン。
JetRacer (JetPack4.5.1 on Xavier NX)/田中裕貴さん

本人コメント「標準のJetRacerからXavier NXに移行し、シャシーはTC-01を使って切れ角を上げています。カメラはマシン後方30cmの位置まで上げており、若干車体の前が映るようになってます。去年の社内レースでタミヤさんに負けてからも色々と改良を繰り返しましたが、やはり今回も全然追いつけなかったので、さらに改良を加えたいです(まずはプレートをカーボンにするところから。3Dプリントはすぐ壊れますね)。JetRacerのアドオンは是非使って感想を聞かせてください!」とのこと。こちらも自動運転ミニカーバトル参加車。アドオンに関しては、Facebookのコミュニティで聞いてください。
AIカーの写真をくださいと言ったらなぜか画像処理されたものが届きました。
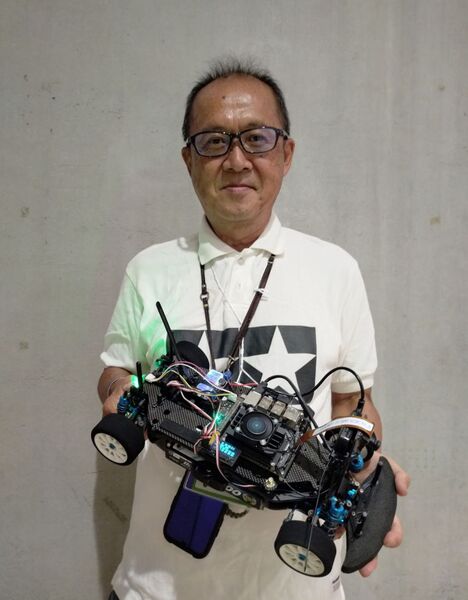
―――/佐々木陽(FaBo、GClue)さん

最後は、私にAIカーを教えてくれた佐々木さんの車。本人コメント「RCカー専用の撮影車です。Tamiya TT-02にInsta360 ONE RS 1-Inch 360 Editionをマウントし、手動走行でAIで走行するラジコンを撮影します。臨場感溢れる走行映像の撮影が可能です」とのこと。ちなみに、佐々木さんは今回バーチャル空間で走らせて作りあげた学習モデルをもとにした自律走行を試されていました(NTT PCさんと取り組まれているとのこと)。Faboのサイトでは、AIカーのキットやチュートリアルなんかもあるので、ご興味のある方はご覧あれ(https://www.fabo.io/)。

こんな感じで全天周カメラがついています。
AIを本当に学びたかったらAIカーをやるべき
とかく画像認識で品質検査みたいなテーマになりがちなAIの入門が、AIカーでは、大人のミニ四駆的な遊びになっているのが伝わったと思う。しかも、これでAI(人工知能)というやつが、良い面も困った面も、どんな連中なのかをヒシヒシと肌で感じることができる。
AIの原理や簡単な例題を座学でやっても、実際の応用となるといろんな要件があって手が出ないことも多い。AIカーでは、Raspberry PiやJetson nanoにAIを搭載、クラウドやPCで学習モデルを作り、さらには物理的な車体やセンサーの組み込みなどもある。1/16スケールの車体がオール・イン・ワンのAIの実験ユニットになっている。
そこで、昨年、教育庁の「東京未来ファクトリー」というものをやらせていただいた。東京にある工業高校、工芸高校、サイエンスハイスクールの生徒たちを対象にした、実験授業だが、その中でAIカーのハンズオンとレースを実施した。当日のようすは コチラ にあるが、彼らの専門分野にも応用できそうという手ごたえを持って帰ってもらうことができた。
ところで、今回、ちょっとおもしろかったのは我々のブースの目の前に、RumiCarというやはり自律走行のモデルカーの方々のブースがあったことだ。私がRumiCarに詳しくないので誤解があるかもしれないが、その場での説明では、車体の前方に3つの距離センサーがついている。なにか障害物があるとそれに反応してコースを走るというものらしい。

なんとなく縁日の金魚すくいを見ているような楽しさがある。
RumiCar、我々がやっているAIカーとはまったく別の発想で走っているというのは、また別の楽しさがある。などと書いてみたのだが、DonkeyCarやJetRacerもまた、本物の自動運転カーに比べたらオモチャのようなシンプルさで走っている(実は、このDonkeyCar的なしくみで実際の車もかなり走れるという意見もあるが)。
この記事の冒頭、マクルーハンが、未来の自動車は“オモチャ”になると予見していたと紹介したが、走らせるだけでなく“いじれる”という意味もあるはずだ。テスラのイーロン・マスクCEOなどは、そんな気分だからやれていると思う。やはり、「The next big thing will start out looking like a toy」(テクノロジーの大波は「オモチャ」のようなモノからやってくる)というわけだ。
「AIでRCカーを走らせよう!」 :https://www.facebook.com/groups/2249059025382644
遠藤諭(えんどうさとし)

株式会社角川アスキー総合研究所 主席研究員。プログラマを経て1985年に株式会社アスキー入社。月刊アスキー編集長、株式会社アスキー取締役などを経て、2013年より現職。角川アスキー総研では、スマートフォンとネットの時代の人々のライフスタイルに関して、調査・コンサルティングを行っている。「AMSCLS」(LHAで全面的に使われている)や「親指ぴゅん」(親指シフトキーボードエミュレーター)などフリーソフトウェアの作者でもある。趣味は、カレーと錯視と文具作り。2018、2019年に日本基礎心理学会の「錯視・錯聴コンテスト」で2年連続入賞。その錯視を利用したアニメーションフローティングペンを作っている。著書に、『計算機屋かく戦えり』(アスキー)、『頭のいい人が変えた10の世界 NHK ITホワイトボックス』(共著、講談社)など。
Twitter:@hortense667https://news.google.com/__i/rss/rd/articles/CBMiKmh0dHBzOi8vYXNjaWkuanAvZWxlbS8wMDAvMDA0LzEwNy80MTA3MTk0L9IBAA?oc=5
2022-10-05 00:00:00Z
CBMiKmh0dHBzOi8vYXNjaWkuanAvZWxlbS8wMDAvMDA0LzEwNy80MTA3MTk0L9IBAA
Tidak ada komentar:
Posting Komentar