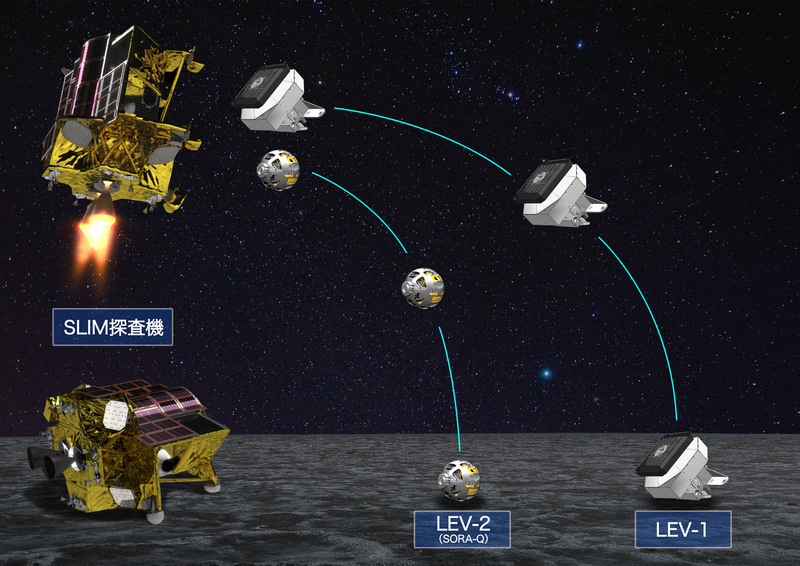
タカラトミーは3月15日、宇宙航空研究開発機構(JAXA)、ソニーグループ、同志社大学と共同開発した超小型の変形型月面ロボットについて、JAXAの小型月着陸実証機「SLIM」に搭載されると発表した。




同社によると、小型月着陸実証機「SLIM」に搭載され、月面でのデータ取得を行うという。また、ispaceの月着陸機「HAKUTO-R」による月面輸送と合わせて、計2回の月面探査を行う予定。
なお、変形型月面ロボット「Lunar Excursion Vehicle 2(LEV-2)」の愛称を「SORA-Q(ソラキュー)」と決定。宇宙を意味する「宙(そら)」と、宇宙に対する「Question(問い)」 「Quest(探求)」、「球体」であること、横からのシルエットが「Q」に似ていることなどから名付けられた。
SORA-Qは、同社の玩具開発によって培われた技術を用いて、変形機構および、超小型、超軽量を実現した直径約80mm、重量約250gの超小型の変形型月面ロボット。
JAXAの「宇宙探査イノベーションハブ」共同研究提案公募の枠組みの下、2016年からJAXAおよび、同社が筐体の共同研究を開始。2019年にソニーグループ、2021年に同志社大学が加わり、4者で共同開発を進めている。



着陸機から球体のまま放出され、月面に着陸すると変形を開始し、走行可能な探査機へと姿を変えるのが特徴。
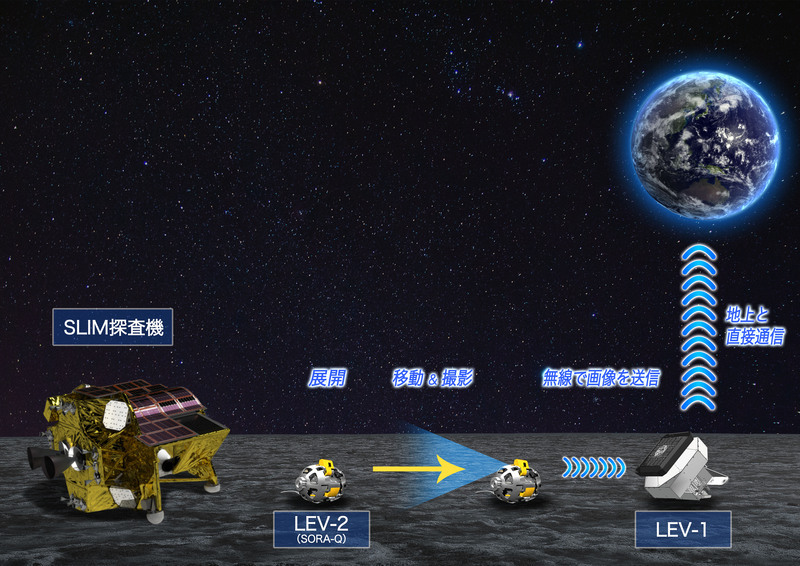
同社によると、月面でのSORA-Qの使命は、低重力環境下における超小型ロボットの探査技術を実証することだという。(1)月面に到達すること、(2)SLIM探査機から分離して月面に着陸すること、(3)月面のレゴリス上を走行し、動作ログを取得、保存すること、(4)着陸機周辺を撮影し、画像を保存すること、(5)撮影した画像データ、走行ログ、ステータスをSLIM探査機とは独立した通信系で地上に送信すること、の計5つのポイントでミッションに挑むという。
月面は、地球と比べて重力が6分の1であり、レゴリス(月の表面を覆う砂)に覆われた路面など、地上とは異なる特殊な環境にある。そこで、将来の月面における有人自動運転技術および、走行技術などの検討に向けて、必要な月面データの取得を目指している。
月面でのデータ取得は、搭載された前後2つのカメラを使用。前方のカメラで周囲の状況を、後方のカメラで自らが月面を走行してできた跡、轍などを撮影する。
撮影した画像データは、SLIMに搭載された小型探査ロボット(LEV-1)へとBluetooth通信で送信され、LEV-1を経由して地球へ送られる計画となる。なお、送信するデータはSORA-Q自身が画像を判断して選別するという。
SORA-Qが月面へ到着してから画像を送信するまでのミッション実行時間は、約1〜2時間を予定。ミッション終了後は、挙動を停止して月に残るという。
https://news.google.com/__i/rss/rd/articles/CBMiKGh0dHBzOi8vamFwYW4uY25ldC5jb20vYXJ0aWNsZS8zNTE4NDkxMC_SAQA?oc=5
2022-03-16 04:59:00Z
1340488190
Tidak ada komentar:
Posting Komentar